Тема: "Квадрокоптер COEX Clover 4"
Исполнитель: Дудко Олег Александрович гр. 341-об
Научный руководитель: Русинов Владислав Леонидович, СКБ "Промышленная робототехника и автоматизация"
Цель: Исследование и разработка умного квадрокоптера на базе COEX Clover 4.
Введение: "Клевер" - это учебный коструктор программируемого квадрокоптера, состоящего из популярных открытых компонентов, а также набор необходимой документации и библиотек для работы с ним.
Набор включает в себя полетный контроллер COEX Pix с полетным стеком PX 4, Raspberry Pi 4 в качестве управляющего бортового компьютера, модуль камеры для реализации полетов с использованием компьютерного зрения, а также набор различных датчиков и другой периферии.
Платформа "Клевера" также включает в себя преднастроенный образ для Raspberry Pi с полным набором необходимого ПО для работы со всей периферией и программирования автономных полетов. Исходный код платформы "Клевер" открыт и доступен на GitHub.
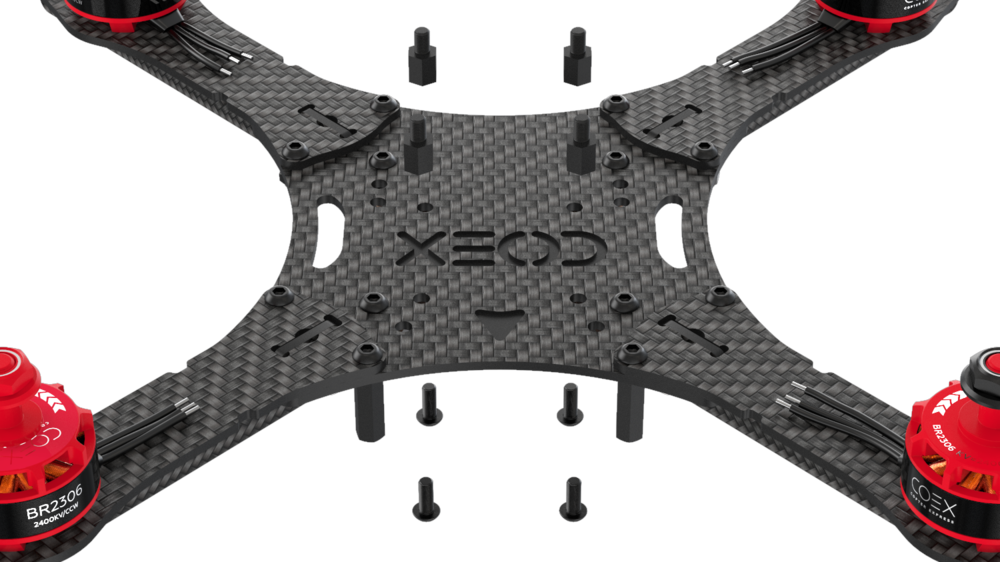
Cборка основы для рамы:1. В случае наличия, закрепите рем-накладки на пластинах жесткости, иначе продолжайте без них.
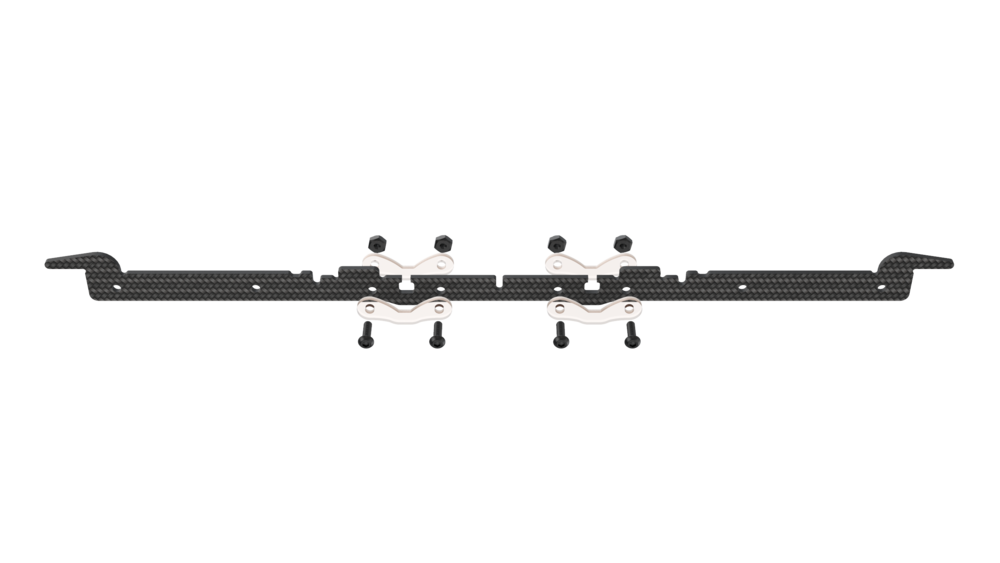
2. Совместите 2 карбоновые пластины жесткости, используя центральные пазы.
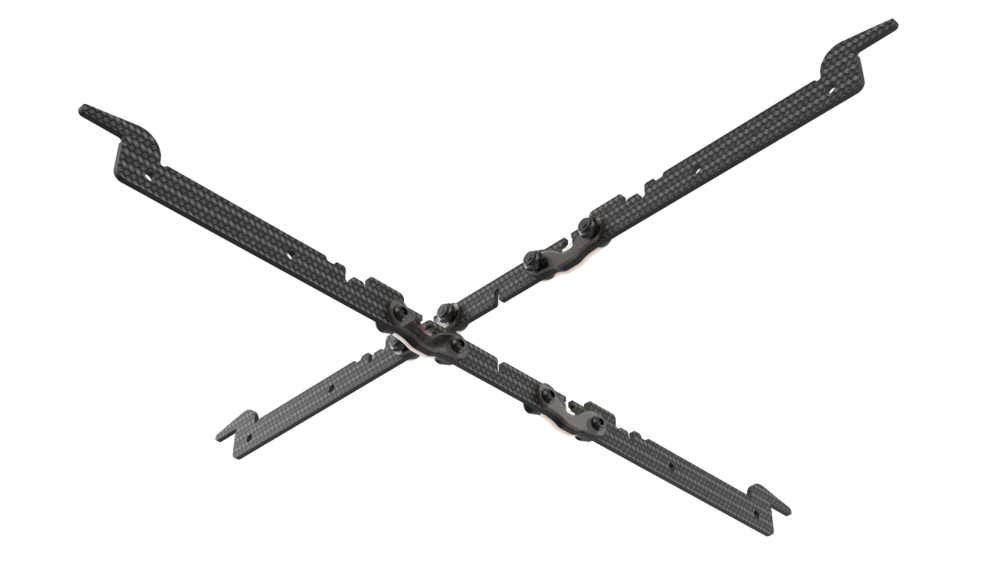
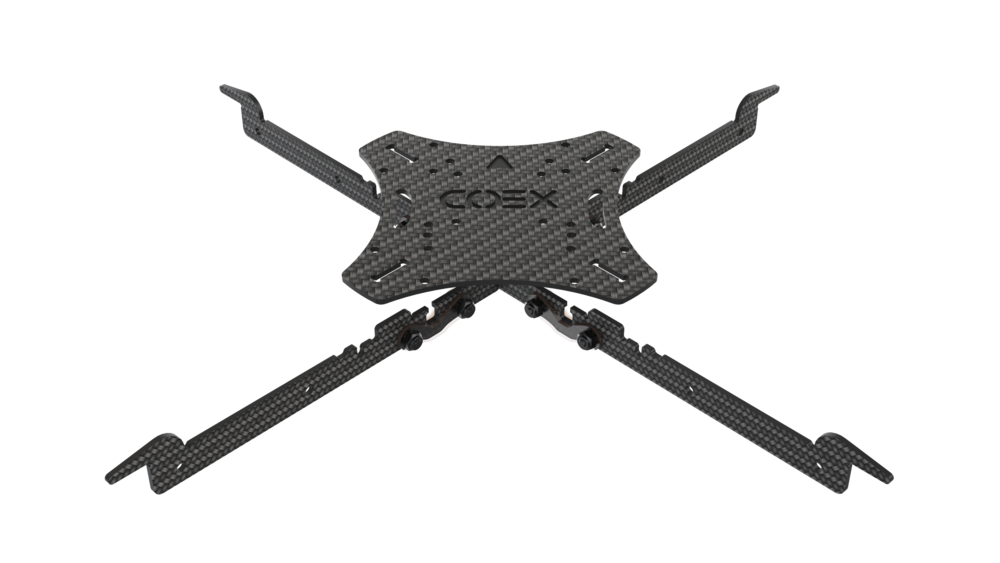
3. Используя пазы, установите сверху карбоновую центральную деку.
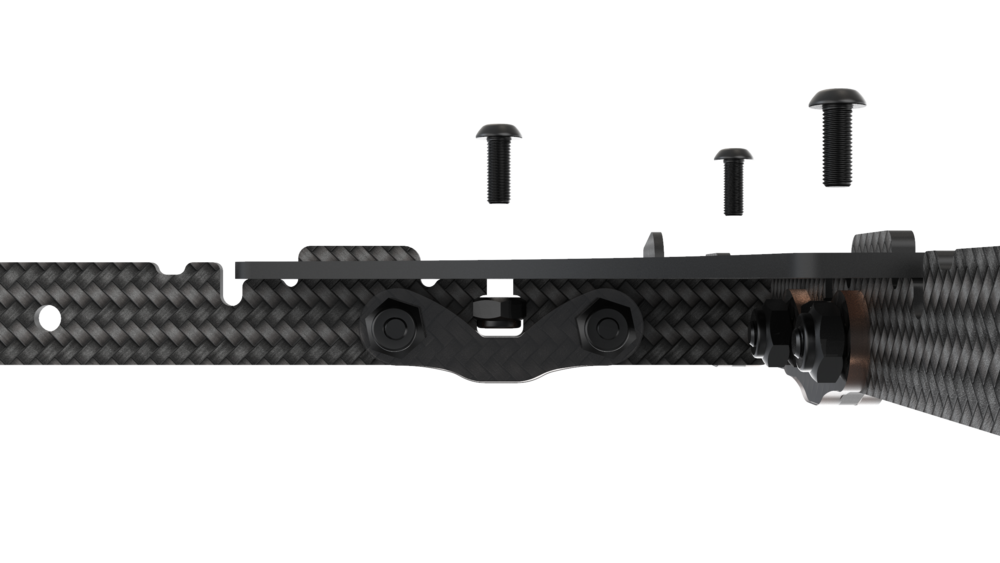
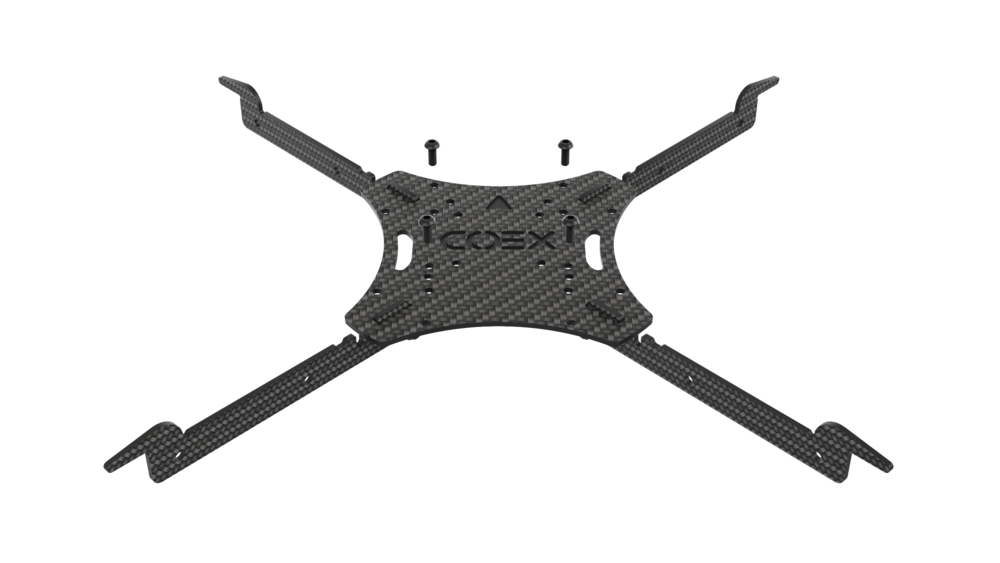
4. Стяните конструкцию с помощью винтов М3х8 и стальных гаек с нейлоновой вставкой, установленных в пазах пластин.
Установка моторов:1. Распакуйте моторы.
2. Используя бокорезы, укоротите провода на моторах:
1) Обрежьте половину длины (оставив 30 мм).
2) Зачистите (снимите 5 мм изоляции с конца провода, не повредив медные жилы).
3) Скрутите медные жилы.
4) Залудите провода, используя пинцет.

3. Установите мотор на луч.
4. Прикрепите мотор к лучу винтами М3х5, используя шестигранный ключ или отвёртку.
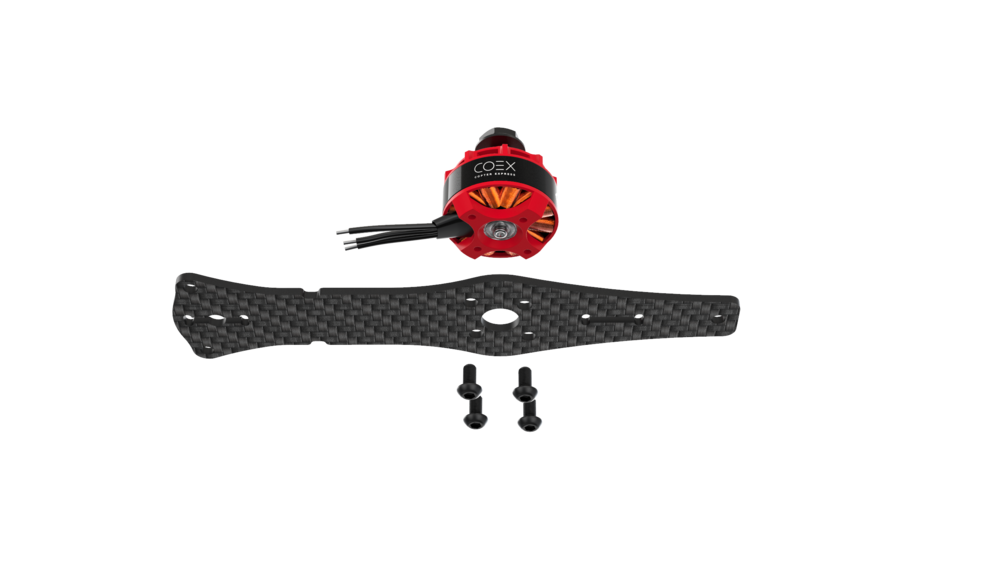
5. Повторите для остальных моторов.
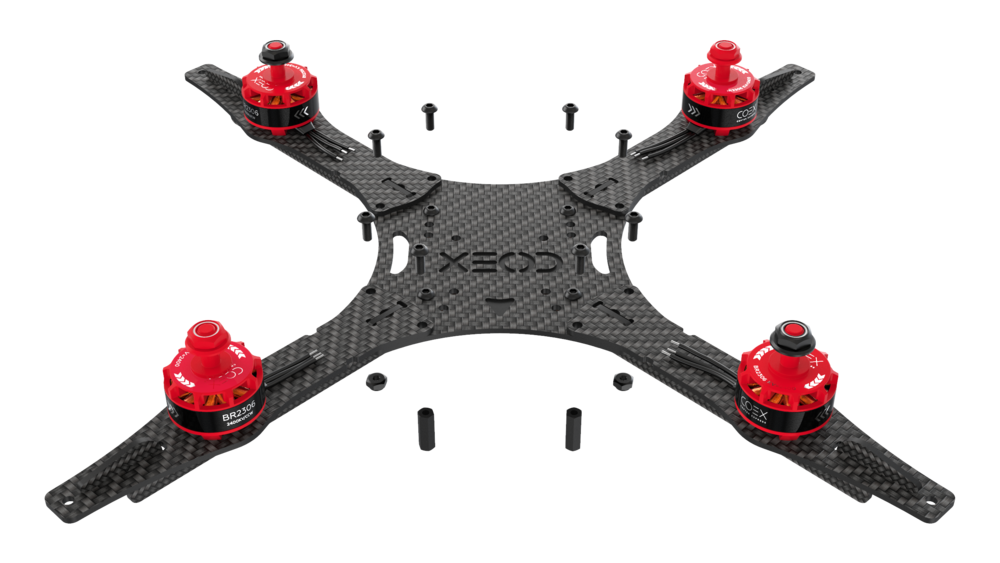
Сборка рамы:1. Установите 4 луча с моторами на базу рамы, используя пазы, согласно схеме вращения моторов.

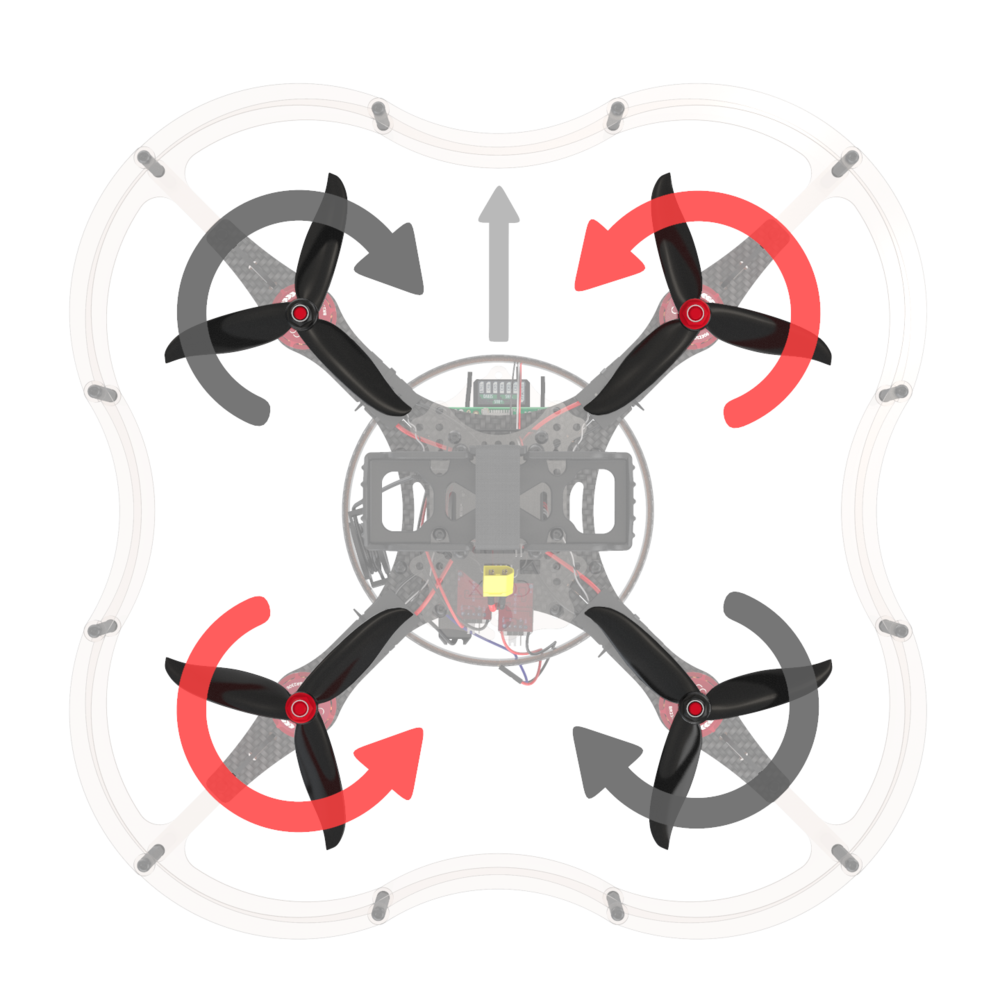 Для правильной установки моторов обратите внимание на цвета гаек. Моторы с красными гайками следует установить на передний правый и задний левый лучи, с чёрными - на передний левый и задний правый.
Для правильной установки моторов обратите внимание на цвета гаек. Моторы с красными гайками следует установить на передний правый и задний левый лучи, с чёрными - на передний левый и задний правый.2. Зафиксируйте лучи на раме, используя 8 винтов М3х8 и 6 стальных гаек, а также 2 стойки "мама-мама" 15 мм.
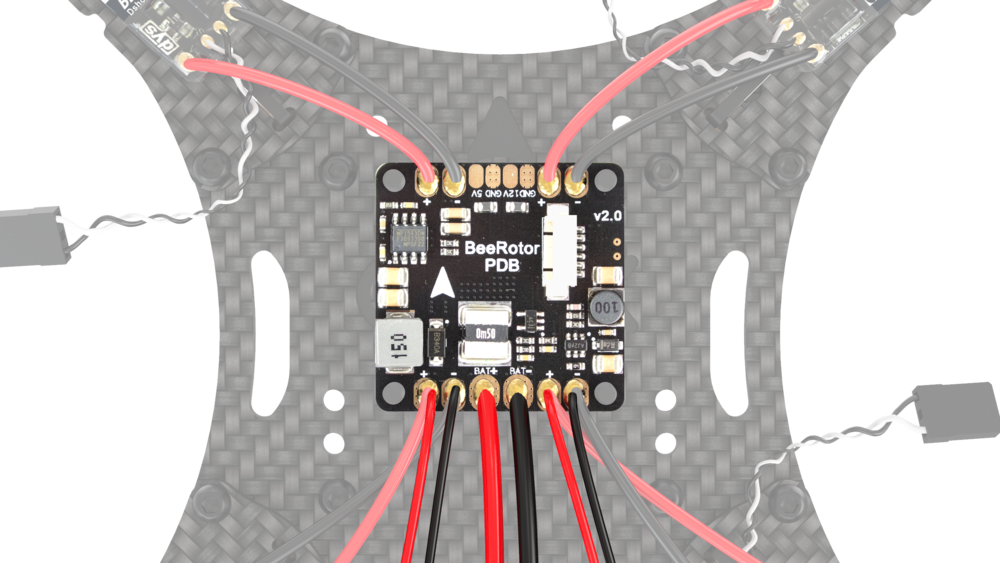
 Подготовка платы распределения питания:
Подготовка платы распределения питания:1. Залудите контактные площадки платы питания.
2. С помощью мультиметра проверьте отсутствие короткого замыкания (прозвонить):
1) Установите мультиметр в режим прозвонки.
2) Проверьте работу мультиметра путем замыкания щупов между собой. При корректной работе прибор издаст характерный звук.
3) Попарно один щуп прикладывается к контакту «+», а второй к «-»/GND. Если в цепи есть короткое замыкание, издается звук.
Монтаж PDB:1. Установите 4 стойки "папа-мама" 6 мм на центральную деку винтами М3х6.

2. Установите PDB на стойки.
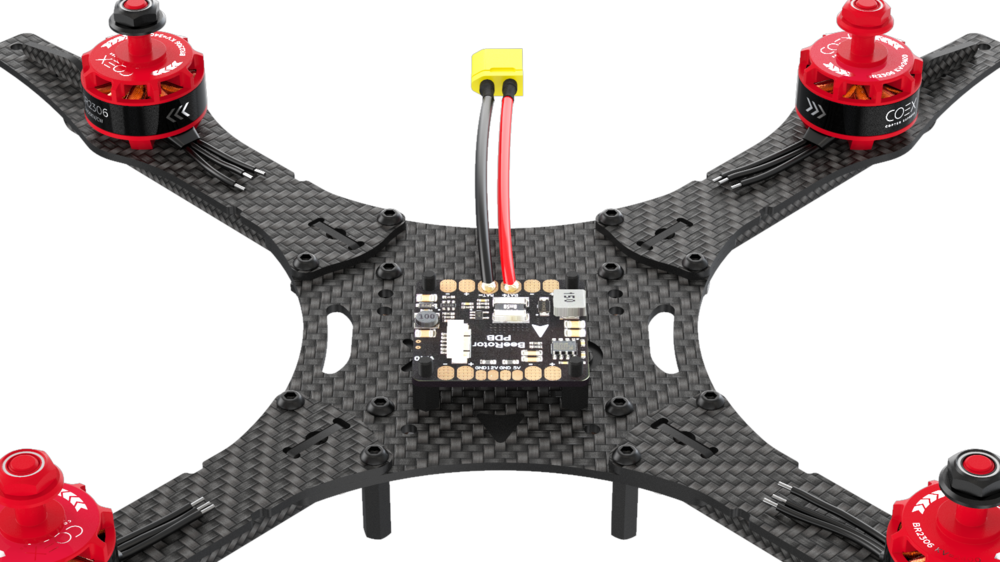
3. Стрелки на PDB и центральной деке должны быть направлены в одну сторону.
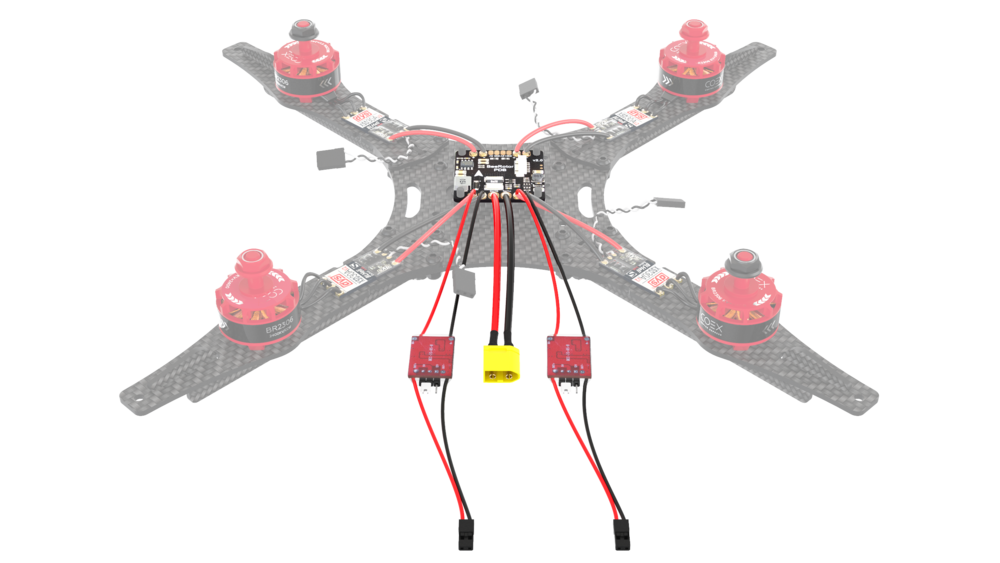
Пайка регуляторов и ВЕС1. Припаяйте фазные провода моторов к регуляторам.
2. Припаяйте силовые провода регуляторов к контактным площадкам платы (красный к «+», черный к «-»).
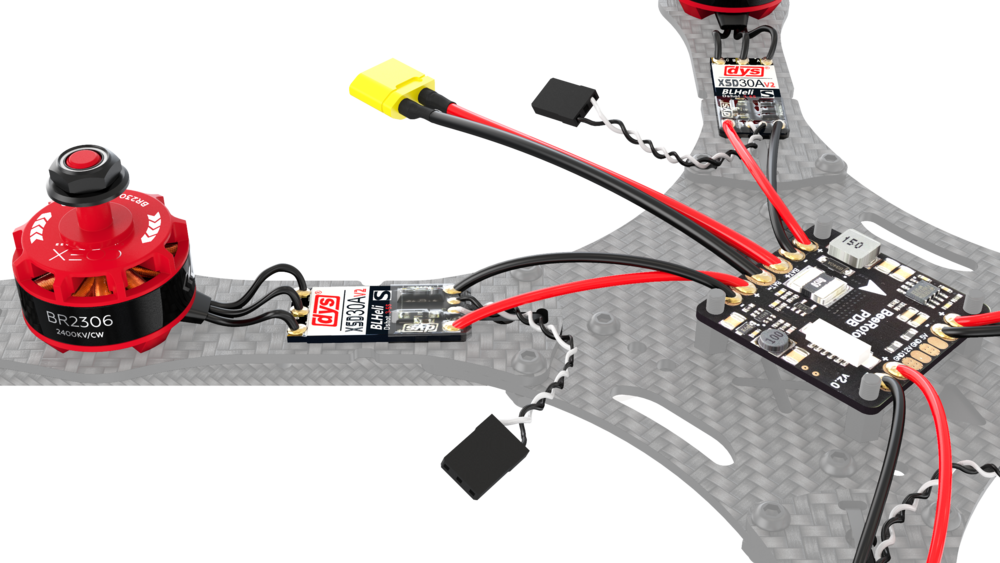
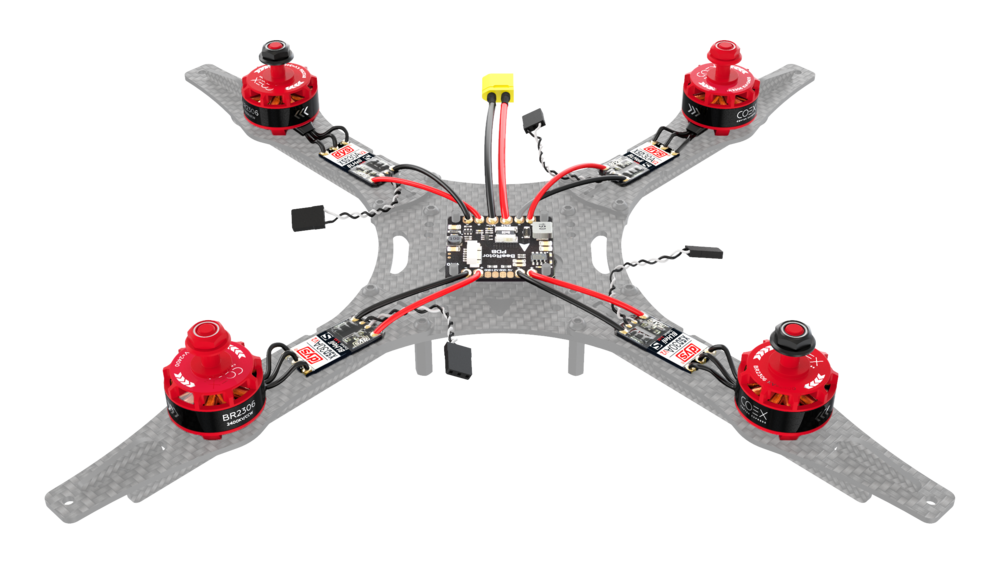
3. Припаяйте силовые провода каждого BEC к контактным площадкам одного из регуляторов (красный к «+», черный к «-»).
4. С помощью мультиметра проверьте, что в цепи нет короткого замыкания.
