Настройка осей "САУ-РОБОТ" согласно правой системы координат
Перераспределены соединительные провода от интерфейсной платы к драйверам шаговых двигателей
Принципиальная схема до:
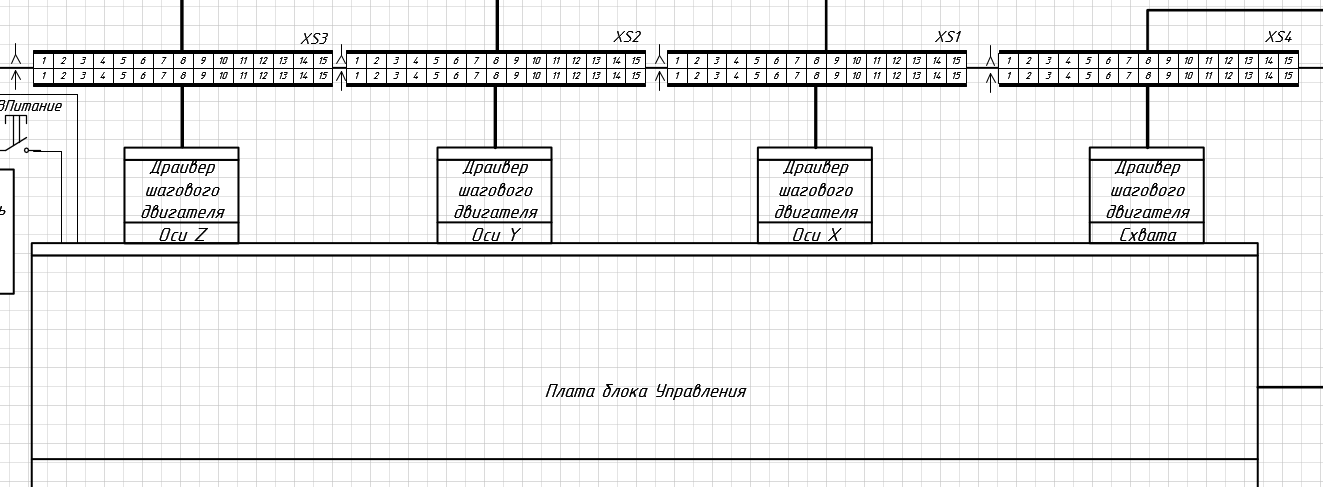
После перераспределения соединительный проводов осей X, Y, Z и A(схват) были подключены к другим разъемам XS
Принципиальный схема после:

При данном подключении робот управляемый в ручном режиме с помощью программы MACH3 полностью удовлетворяет поставленную задачу.
